Навигационная цепочка "где я сейчас?" - траектория от главной до текущей страницы сайта. Breadcrumbs.
Передовица (меню разделов)
⇓
Документы
⇓
Журналы
⇓
Вопросы радиоэлектроники, серия ЭВТ 9\84
Вопросы радиоэлектроники, серия ЭВТ 9\84
УДК 681.3.-181.48Л.Б. Власова, Д.М. Чамкин, Ю.В. Чугунов
Контроллер для сопряжения микро-ЭВМ с гибким магнитным диском.
Приведено краткое описание контроллера для сопряжения микро-ЭВМ с гибким магнитным диском.
Развитие микропроцессорной техники создало предпосылку для миниатюризации всей вычислительной системы в целом, что диктует применение мини-накопителей информации, например, накопитель на гибком магнитном диске (НГМД) типа ЕС-5088 с диаметром гибкого магнитного диска (ГМД) 133 мм. Применение быстродействующей микроЭВМ, построенной по n-МОП технологии, позволяет разработать простой и дешёвый контроллер для обслуживания НГМД [1].
На аппаратную часть контроллера возлагается только работа по преобразованию информации из последовательной формы в параллельную при считывании и наоборот - при записи. Резко снизить объём оборудования позволяет построение нестандартных узлов переработки информации на основе постоянных запоминающих устройств (ПЗУ) [2]. Совместно с регистрами такие модули составляют технически полный базис, так как произвольный конечный автомат может быть реализован по известной структурной схеме, изображённой на рис. 1.
Рис. 1. Структурная схема конечного автомата на ПЗУ
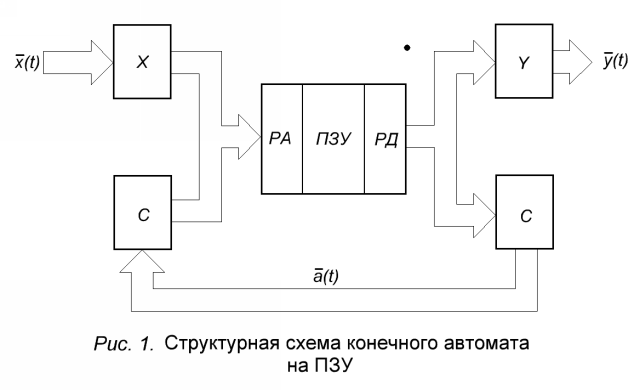
Текущее состояние a̅(t) фиксируется в части С регистра адреса РА, в который заносится также текущий входной сигнал x̅(t). В соответствии с занесённым в регистр адреса состоянием a̅(t) и входным сигналом x̅(t) из ПЗУ в регистр данных РД считывается код, одна часть которого (y) определяет выход y̅(t), а другая - новое состояние автомата a̅(t+1), которое заносится в начале следующего такта работы по цепи обратной связи в регистр адреса РА одновременно с занесением туда следующего входного сигнала x̅(t+1).
При использовании базиса из модулей ПЗУ и регистров не применяются интегральные схемы высокой степени интеграции и в то же время достигается большая гибкость проектирования.
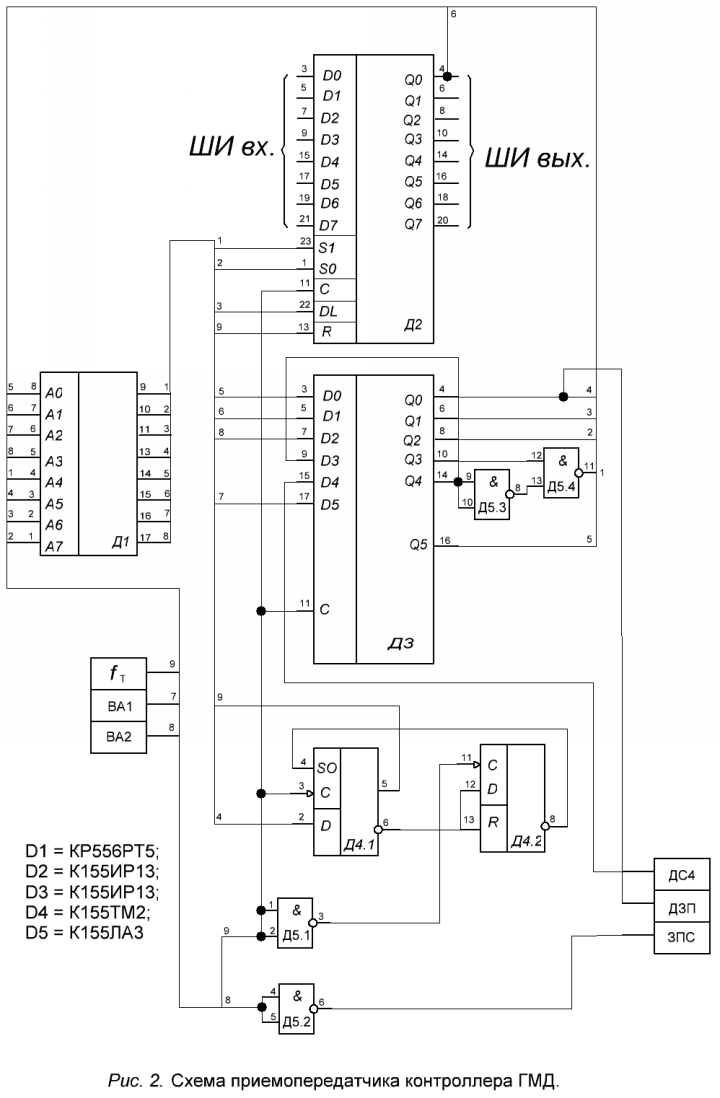
Используя данный принцип, был изготовлен контроллер для сопряжения НГМД с микроЭВМ, схема приёмопередатчика которого приведена на рис. 2.
Весь протокол работы НГМД формируется программным путём, а управляющие сигналы подключены к накопителю через порты входов-выходов микроЭВМ.
Приёмопередатчик содержит 8-разрядный сдвиговый регистр D2, к параллельным входам и выходам которого подключены входные и выходные информационные шины микроЭВМ (ШИвх и ШИвых соответственно.) В ПЗУ D1 хранится весь набор микрокоманд, определяющих алгоритм работы приёмопередатчика. Содержимое ПЗУ приведено в табл.1. В регистре данных D3 фиксируется текущее состояние контроллера.
Таблица 1
1000 - В8 В8 88 88 0A 0A 0A 0A
1008 - 88 С9 88 С9 88 СВ 88 CA
1010 - 88 С8 08 48 0A 0A 0A 0A
1018 - 88 С9 88 С9 88 СВ 88 СВ
1020 - В8 3D В8 В8 0A 0A 0A 0A
1028 - 98 D9 98 D9 98 DB 98 DB
1030 - 98 DD 98 D8 0A 0A 0A 0A
1038 - 98 D9 98 D9 98 DB 98 DB
1040 - В8 В8 В8 В8 0A 0A 0A 0A
1048 - A8 Е8 A8 E8 A8 Е8 A8 E8
1050 - А8 Е8 A8 E8 0A 0A 0A 0A
1058 - A8 E8 A8 E8 A8 E8 A8 E8
1060 - В9 FD В8 F8 0A 0A 0A 0A
1068 - В8 F8 В8 F8 В8 F8 В8 F8
1070 - В9 FD 50 F8 0A 0A 0A 0A
1078 - В8 F8 В8 F8 В8 F8 В8 F8
1080 - В8 В8 С8 В8 0A 0A 0A 0A
1088 - 48 28 48 28 48 28 48 28
1090 - 48 28 С8 28 0A 0A 0A 0A
1098 - 48 28 48 28 48 28 48 28
10A0 - В8 В9 В8 В8 0A 0A 0A 0A
10A8 - 58 38 58 38 58 38 58 38
10B0 - 49 С9 58 38 0A 0A 0A 0A
10B8 - 58 38 58 38 58 38 58 38
10C0 - В8 В8 В8 В8 0A 0A 0A 0A
10C8 - 68 08 68 18 68 08 68 18
10D0 - 68 18 68 18 0A 0A 0A 0A
10D8 - 68 08 68 18 68 08 68 18
10E0 - 8D ВD 78 70 0A 0A 0A 0A
10E8 - 78 18 78 08 78 18 78 08
10F0 - 0D 2D 78 70 0A 0A 0A 0A
10F8 - 78 18 78 08 78 18 78 08
Сигнал данных, поступающих при чтении с ГМД (ДСЧ), подключен к входу D4 регистра D3, что необходимо для синхронизации фронтов ДСЧ и входной тактовой частоты ƒT, равной 2 МГц. При выполнении операции записи информации сигнал требования записи (ЗПС) формируется на выходе вентиля D5.2, а данные, предназначенные для записи (ДЗП), - на выходе Q0 регистра D3.
Режим работы приёмопередатчика задаётся управляющими сигналами ВА1 и ВА2, подключенными к адресным шинам ПЗУ с микрокомандами в соответствии с табл. 2. Структура размещения и формат данных при записи на ГМД определяются особенностями микроЭВМ.
| ВА1 | ВА2 | Режим работы контроллера |
|---|---|---|
| 0 | 1 | чтение |
| 0 | 1 | запись |
| 0 | 1 | загрузка информацией регистра D2 |
Поверхность каждой дорожки ГМД разбита на 16 секторов, которые формируются при разметке диска. Сектор имеет поле адреса и поле данных. Эти поля сопровождаются маркерами начала и конца поля и контрольной суммой. Маркеры представляют собой фиксированную последовательность длиной в 3 байта. Адресное поле содержит кодированные двумя байтами номер дорожки, номер сектора и контрольную сумму. Все дорожки пронумерованы от края ГМД к его центру.
Кодирование информации при записи осуществляется таким образом, чтобы старший разряд байта был равен 1 и в байте не было бы более одной пары подряд стоящих нулевых бит.
Для синхронизации приёма информации от НГМД используются синхрокоды следующей конфигурации: 1111 1111 00, при поступлении которых в контроллер осуществляется автоматический сброс содержимого сдвигового регистра D2. Пять синхрокодов, записанные в качестве разделителей перед адресной и информационной частями секторов на ГМД, позволяют надёжно синхронизировать работу НГМД и контроллера.
Каждый информационный байт поступает в контроллер по последовательному каналу от НГМД ровно за 32 мкс, поэтому процесс декодирования данных представляет собой сложную задачу. Поиск нужного сектора на дорожке ГМД осуществляется программно путём чтения адресной части сектора и декодирования значений номеров дорожки и сектора. При успешной идентификации нужного сектора производятся поиск и чтение поля данных сектора в буферы памяти микроЭВМ. При совпадении контрольной суммы осуществляется декодирование прочитанной информации.
Запись данных производится аналогичным образом.
Заключение. Описанный контроллер изготовлен на микросхемах 155 серии и использовался для хранения графической информации о рисунках тканей при автоматизации рабочего места художника лёгкой промышленности.
ЛИТЕРАТУРА
1. U.S. Patent. Controller for magnetic disk, recorder, or the like. - Jul, 1, 1980, 4, 210, 959
2. Глушков M.В. и др. Микропроцессоры на ПЗУ. - Управляющие системы и машины, 1977, N 5 (31).
Статья поступила в мае 1983 г.